")
")

Unlike a simple LED or low power components,
engines require that the power Raspberry Pi can not afford.
Do you may not connect directly to the engines, as this could damage your Raspberry Pi
It can not deliver much current, you may wild reboots.
To feed and properly control the motors of our Rover, you'll do a little editing.
It will separate the power of the logic portion.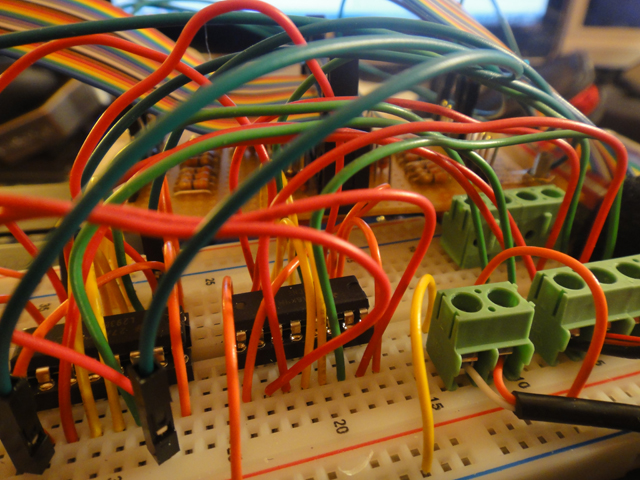
elements required
We could use opto-couplers and H-bridges to manage all.
But for reasons of economy and simplicity, I chose to use the L293D component.
It is very popular in the field of robotics because it includes everything needed directly.
Here is a wiki very well that explains how it : http://mchobby.be/wiki/index.php?title=Pont-H_L293D
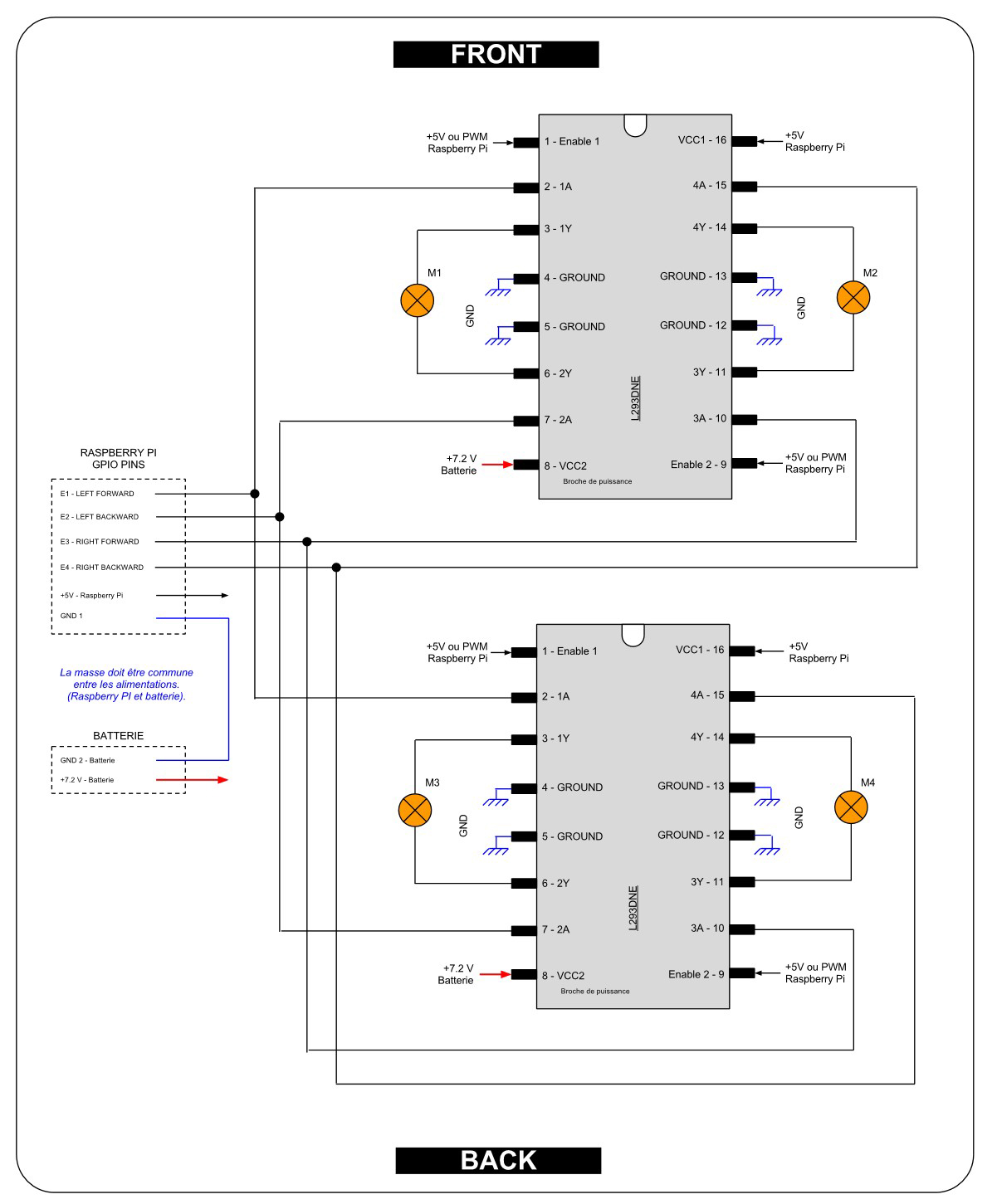
In our case, we have 4 engines (4WD), we will use two L293D.
Not having the necessary to achieve PCB material, I chose to perform editing on a prototyping board.
List of equipment:
- 2 L293DNE (http://wak.li/1rm)
- 1 prototyping board (http://wak.li/1rn)
- 2 power supply board prototyping (http://wak.li/1ro)
- 1 wire assembly (http://wak.li/1rp)
- 5 screw connector for the connection of motors and power (http://wak.li/1rr)
- 2 16 Pin DIL (http://wak.li/1rq)
- 1 wire assembly connectors female - male (http://wak.li/1rs)
And 4 engines (see the article directly on the realization of the structure)
electronic scheme